双像解析
单张像片后方交会
定义
利用3个及以上的地面控制点及其在像片上的像点,确定一张像片外方位元素的方法
作用
求解外方位元素
原理
共线条件方程
要求
至少三个不在同一直线上的地面控制点
 “ alt=”后方交会” style=”zoom:50%;” />
“ alt=”后方交会” style=”zoom:50%;” />
立体像对前方交会
概念
- 由立体像对中两张像片的内外方位元素和像点坐标来确定相应地面点在物方空间坐标系中坐标的方法
- 只有利用立体像对上的同名像点,才能得到两条同名射线在空间相交的点,即该地面点的空间位置
- 已知立体像对中两张像片的内外方位元素和像点坐标
- 未知相应地面点的地面坐标
原理
- 共线条件方程
 “ alt=”共线条件方程” style=”zoom:50%;” />
“ alt=”共线条件方程” style=”zoom:50%;” />
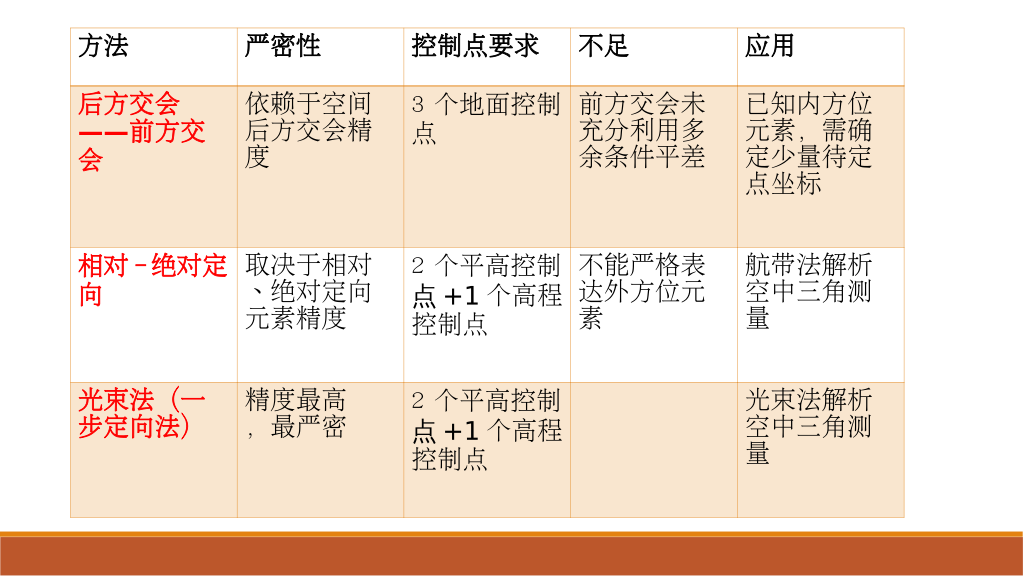
后交加前交
空间后方交会与前方交会求解地面点坐标的计算方法:
实现由单片后方交会求出左右像片的外方位元素,再利用空间前方交会公式求出待定点坐标
后方交会的3个或3个以上地面控制点
主要步骤
野外像片控制测量(重叠部分至少四个已知地面控制点)
用立体坐标量测仪量测像点坐标
空间后方交会计算像片外方位元素(求6个外方位元素)
空间前方交会计算未知点地面坐标
相对定向
概念
- 相对定向元素(5个):描述立体像对两张像片相对位置和姿态关系的参数
- 解析相对定向:利用立体像对同名光线对对相交,根据量测的像点坐标,以解析法计算方法,解求两张像片相对定向元素的过程
原理
- 同名光线对对相交于核面内(共面条件方程)
- 至少需要5个相对定向元素
- 至少需要量测5对同名像点的像点坐标
1.连续法解析相对定向原理
- 相对定向完成标志为:上下视差为0
- 量测5对以上的同名点可以按最小二乘平差法求相对定向元素
2.单独法解析相对定向原理
- 相对定向完成标志为:上下视差为0
- 量测5对以上的同名点可以按最小二乘平差法求相对定向元素
绝对定向
概念
- 相对定向建立的立体模型———像空间辅助坐标系
- 通过像点坐标解求模型点坐标———摄影测量坐标系的坐标
- 通过将相对定向立体模型进行缩放平移和旋转,确定立体模型在地面坐标系中的方位和大小———摄影测量坐标系与地面摄影测量坐标系转化——-立体模型的绝对定向
- 绝对定向参数(7个):描述立体像对在摄影瞬间的绝对位置和姿态的参数
- 实质:模型点的摄影测量坐标向地面坐标的数学变换
原理
- 空间相似变换
- 包含 旋转 平移 缩放三个内容
- 至少需要2个平高控制点和1个高程点,且任意3个点不能位于同一条直线上
- 为了保证精度,通常使用4个或4个以上的平高控制点列误差方程式,求解7个绝对方位元素
- 3个控制点
- 7个未知数
- 7个方程
坐标重心化
一种数据预处理方法
减少坐标在计算过程中的有效位数,提高精度
简化方程式的系数,使个别项的数值为零,从而加快计算速度
重心化坐标:将所有的摄影测量坐标的地辅系坐标分别平移到以各自重心为原点的坐标系中
相对加绝对
- 相对定向:0个控制点,至少5对以上同名像点,求解5个相对定向元素
- 绝对定向:2个平高 ,1个高程,确定立体模型比例尺和在地面坐标系中所处方位
- 像点及控制点,必须在立体像对内
光束法解析摄影测量
原理
- 用已知少数控制点以及待求地面点,在像对内以共线方程式为基础,未知点和控制点同时列误差方程,联合解算,同时解求两张像片的外方位元素与待定点坐标
- 理论模型:共线条件方程
平差
参加平差的点:平高 平面 或高程 待求点
平高控制点:
即可在重叠范围内,也可在单像内
平面控制点(
)或高程控制点() 必须在重叠范围内
待求点
必须在重叠范围内
条件
已知值:像控点大地坐标系
观测值:像控点像点坐标和待定点坐标
未知数:6个外方位元素
待定点地面摄影测量坐标 X,Y,Z
未知数个数:6个外方位元素 像片数 + 待求点 3
方程个数:(对应点的重叠度 对应点数 ) 2个方程


汇总
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Faith!
 微信
微信 支付宝
支付宝



评论